【講師向け】数式で挫折させない!「Adagrad」を直感的に教える『ぬかるみセンサー』の例え話
 山崎講師
山崎講師こんにちは。ゆうせいです。
ディープラーニングの研修をしていて、受講生の皆さんが一番苦戦する場所はどこでしょうか?
「誤差逆伝播法」もなかなかの強敵ですが、実は地味に厄介なのが「最適化アルゴリズム(Optimizer)」の種類ではないでしょうか。
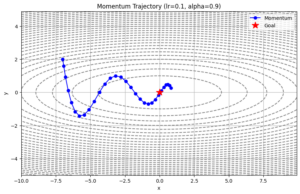
SGD、Momentum、Adagrad、Adam……。
「先生、アルファベットばかりで何が違うのか分かりません!」
「数式の 
そんな悲鳴が聞こえてきそうです。
今日は、その中でも特に重要な転換点となる「Adagrad(アダグラッド)」について解説します。
これを理解すると、現代の最強アルゴリズムである「Adam」への理解もスムーズになります。
今回は、難解な数式を「賢いハイキングシューズ」に例えて、直感的に理解してもらう教え方をご紹介します。
SGDの弱点とAdagradの画期的な点
まず、Adagradが登場する前の世界(SGD)を思い出してもらいましょう。
SGD(確率的勾配降下法)は、谷底を目指して山を降りるハイカーです。
しかし、彼は「常に歩幅が一定」という弱点を持っています。
- 急な坂道でも、平坦な道でも、同じ歩幅で進む。
- だから、急な坂では転げ落ちそうになり、平坦な道ではなかなか進まない。
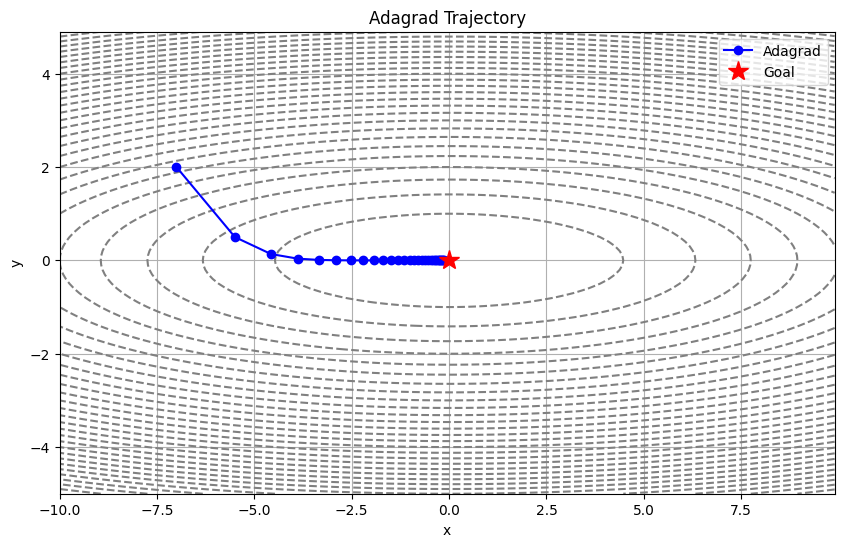
そこで登場したのが Adagrad です。
正式名称は Adaptive Gradient Algorithm。「適応的勾配アルゴリズム」です。
生徒さんにはこう伝えてください。
「Adagrad は、足元を見て歩幅を自動調整してくれる、センサー付きの靴を履いたハイカーです」
重要な変数「  」は「足の疲れ」
」は「足の疲れ」
Adagrad の数式には、必ず
教科書的な説明では「勾配の二乗和」ですが、これでは誰もイメージできません。
ここは「足の疲れ(または、歩いた距離の記憶)」と説明しましょう。
このアルゴリズムは、以下のルールで動きます。
- よく動いたパラメータ(たくさん更新された道)は、
- 逆に、今まであまり動いていないパラメータは、
つまり、「今までたくさん勉強した部分は復習程度に、まだ勉強していない部分はガッツリやる」という、非常に効率的な学習スタイルなんです。
これを専門用語で「学習率減衰」と言いますが、「疲れに合わせてペース配分する」と言えば、高校生でも頷いてくれます。
数式の「ルート」と「割り算」の意味
Adagrad の数式を見てみましょう。
$$W \leftarrow W - \eta \frac{1}{\sqrt{h}} \frac{\partial L}{\partial W}$$
この式を、日本語に翻訳します。
: 現在の場所
(イータ): 基本のやる気(学習率)
: 坂道の傾き(勾配)
: ここが Adagrad の本体!
分母に
分母が大きくなる(疲れ
「たくさん動いて
これが数式の意味です。
なぜ 
「
と答えてあげましょう。
Pythonコードで見る Adagrad の正体
それでは、実際のコードを見ながら解説します。
NumPyを使って実装すると、Adagrad の中身は驚くほどシンプルです。
以下は、研修でそのまま使えるサンプルコードです。
import numpy as np
class Adagrad:
def __init__(self, lr=0.01):
self.lr = lr # 基本の学習率(eta)
self.h = None # 過去の勾配の記憶(初期値はNone)
def update(self, params, grads):
# 初回のみ h を初期化(0で埋め尽くされた辞書を作る)
if self.h is None:
self.h = {}
for key, val in params.items():
self.h[key] = np.zeros_like(val)
for key in params.keys():
# 【ここがポイント1】
# 勾配を二乗して h に足し込む(過去の情報を蓄積)
self.h[key] += grads[key] * grads[key]
# 【ここがポイント2】
# h のルートで割って、学習率を調整する
# (1e-7 は 0 で割るのを防ぐための小さなお守り)
params[key] -= self.lr * grads[key] / (np.sqrt(self.h[key]) + 1e-7)講師としての解説ポイント
コードを見せながら、以下の2点を強調してください。
self.h[key] += grads[key] * grads[key]ここが「記憶」を作っている部分です。今の坂道の急さ(grads)を二乗して、これまでの合計(h)に足しています。ずっと足し算をしているので、params[key] -= ... / (np.sqrt(self.h[key]) + 1e-7)ここが「ブレーキ」の部分です。大きくなった1e-7(0.0000001)を足しているのは、もしだった場合、割り算ができずにプログラムがエラー(ZeroDivisionError)で止まってしまうのを防ぐためです。「エアバッグ」みたいなものですね。
Adagrad のメリットと致命的な弱点
最後に、この手法の良い点と悪い点を伝えて、次の学習への意欲を掻き立てましょう。
メリット
パラメータ一つ一つに合わせて、個別に学習率を調整してくれるので、人間が細かく設定しなくても勝手にいい感じに学習が進みます。
デメリット
ここが重要です。
生徒さんに質問してみてください。
「
答えは、「分母が巨大になりすぎて、更新量がゼロになる(学習が止まる)」です。
ブレーキがかかりすぎて、最終的に一歩も動けなくなってしまうのです。
この弱点を克服するために生まれたのが、過去の記憶を少しずつ忘れる機能を持った 「RMSProp」 や、さらに進化させた 「Adam」 なのです。
今日のまとめ
いかがでしたか?
- Adagrad は「足元を見て歩幅を変える賢い靴」
- 変数
- 疲れが溜まると、割り算でブレーキをかける
- でも、ブレーキがかかりすぎて止まってしまうのが玉に瑕
このように順を追って説明すれば、複雑な数式もコードも、意味のあるストーリーとして受講生の記憶に残ります。
次は、この Adagrad の弱点を克服した、現代AIのスタンダード「Adam」について解説する準備をしておきましょう!
それでは、また次の記事でお会いしましょう。
セイ・コンサルティング・グループでは新人エンジニア研修のアシスタント講師を募集しています。
投稿者プロフィール
- 代表取締役
-
セイ・コンサルティング・グループ株式会社代表取締役。
岐阜県出身。
海外放浪の末、2000年創業、2004年会社設立。
IT企業向け人材育成研修歴業界歴20年以上。
すべての無駄を省いた費用対効果の高い「筋肉質」な研修を提供します!
この記事に間違い等ありましたらぜひお知らせください。
学生時代は趣味と実益を兼ねてリゾートバイトにいそしむ。長野県白馬村に始まり、志賀高原でのスキーインストラクター、沖縄石垣島、北海道トマム。高じてオーストラリアのゴールドコーストでツアーガイドなど。現在は野菜作りにはまっている。
最新の投稿
 山崎講師2026年8月1日コンピューターが数値計算の誤差に対処する仕組みと精度管理の方法
山崎講師2026年8月1日コンピューターが数値計算の誤差に対処する仕組みと精度管理の方法- 山崎講師2026年8月1日0乗が1になる理由を2乗の計算式から解説する指数法則の基礎
- 山崎講師2026年8月1日機械学習モデルの予測理由を解釈するSHAPとシャープレイ値の基礎
- 山崎講師2026年8月1日適合率と再現率の概念と初心者向けのわかりやすい再翻訳案